方案概述:
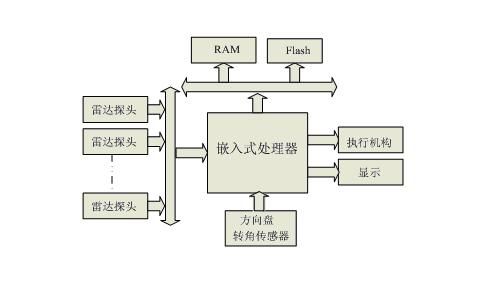
自動泊車系統,可以使汽車自動地以正確的停靠泊車位,該系統包括環境數據采集系統、中央處理器和車輛策略控制系統,所述的環境數據采集系統包括圖像采集系統和車載距離探測系統,可采集圖像數據及周圍物體距車身的距離數據,并通過數據線傳輸給中央處理器;中央處理器采用英飛凌 SAK-XC2336B-40F80L AA,將采集到的數據分析處理后,得出汽車的當前位置、目標位置以及周圍的環境參數,依據上述參數做出自動泊車策略,并將其轉換成電信號;車輛策略控制系統接受電信號后,依據指令做出汽車的行駛如角度、方向及動力支援方面的操控。本項目將在已經開發出的原理樣機的基礎上,結合產品樣機的要求,進行系統的可靠性研究、匹配性試驗以及生產工藝的優化,以改進系統的穩定性和可靠性,降低成本,滿足產品的使用性能。結構組成如下圖所示。
性能指標:
泊車最大行駛速度 10Km/h
在目標停車位置上與其他兩輛相鄰汽車的平行距離 30cm
最小停車位長度 1.5倍車身長度
正常工作溫度:-40~85℃;
存儲溫度:-40~125℃;
ECU通過相關環境、機械試驗,具有過流、過電壓、短路等常規保護功能;
ECU符合EMC要求;
產品圖片: